六自由度运动模拟平台广泛应用于机床行业、机器人领域、
航空航海运动模拟器、空间宇航器对接、大型射电望远镜的轨迹精密控制等领域。
六自由度并联方式的运动模拟平台具有刚度大、承载能力强、动态响应快等优点,
再配合以高精度的丝杠传动,可以达到很高的控制精度,
目前高精度的运动平台控制精度≤0.001mm。
公司可以承建不同规模的运动模拟平台,
承载力在500kg以下的小型运动模拟平台可以采用电动方式;
大型运动模拟平台采用液压驱动方式,承载能力可以达到几十吨以上。
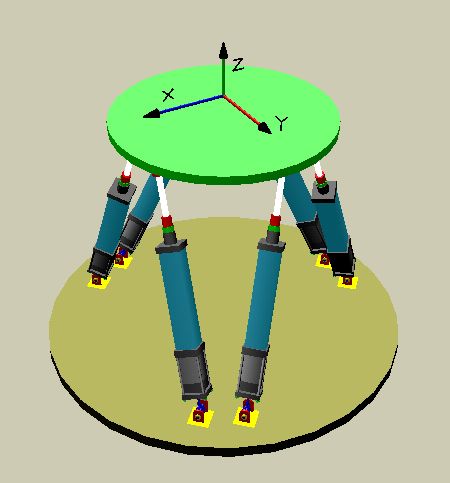
六自由度运动模拟平台的运动描述采用两个坐标系,如图4-1所示,上平台采用动坐标系OXYZ,
下平台采用静坐标系(又称参考坐标系) 。选取动坐标系的坐标原点为负载物和上平台的综合质心,
垂直方向为Z方向,X方向和Y方向如图所示。动坐标系固定在上平台上。
六自由度平台控制系统主要由控制器和控制软件组成,控制器是控制系统的基本平台,其性能决定了控制系统的运行速度、控制能力、和可靠性。
数字电动作动器是采用伺服电机进行驱动的,通过控制六个缸的位移和速度实现台面的六自由度运动。
控制系统主要功能是对控制过程建模、解算、生成命令信号,然后发出指令控制台面运动,同时接收各种反馈信号并机进行处理;
伺服控制软件主要用于对控制信号进行设置,对反馈信号进行实时显示、判断处理和存储;
同时对系统中的其它信息和运动状态进行逻辑分析和判断,以实现对系统的故障监测和处理。
控制系统的核心内容都是表现在控制软件上,我们研发的运动控制软件采用多级分层的结构方式,分成上位机和下位机,
上位机和下位机中又分成若干层,层与层之间采用固定的接口方式,使得每层相对于其他的业务层具有相对的独立性,
这样易于软件的修改和功能升级等过程的操作。
上位机部分运行在PC或笔记本电脑上,主要负责数据显示、绘图、命令设置、参数设置、错误显示等人机交互的功能;
下位机程序运行在控制器中,主要负责命令生成、数据收集、限值检测、错误检测、伺服执行等功能,上位机与下位机之间采用网线连接,
使用TCP/IP协议传输数据。
在上位机和下位机中分别设置了先后对应的通讯协议层和数据转换层分别负责数据的打包解包以及转换内部可识别的数据结构的功能。
上位机中软件分为三层:
分别为通讯协议层、数据转换翻译层、界面交互层。通讯协议层负责为**底层负责下载命令值参数值、接收采集的数据、设备错误标识、
限值触发标识;数据转换层负责将下载的数据打包,转换成通讯层的数据包,将接受的数据解开取出相应的内部可识别数据;
界面交互层负责将采集的数据显示,提供用户设置命令及参数的界面。
下位机软件分为四层:分别为伺服执行、命令及数据收集层、数据转换翻译层、通讯协议层。
其中通讯协议层与数据转换翻译层与上位机一致。命令及数据收集层负责生成各作动器的命令信号(正弦、随即信号,平台解耦),
采集各传感器数据,检测并收集控制器的错误情况,检查限值超限等情况;伺服执行主要负责执行命令设定、PID设定、前馈处理等伺服执行机构。
采用多级分层结构的好处是:独立性好,每一层封装相应的业务,当一层的业务发生变动调整时不影响其他层的业务;
可扩展性好,能够方便的增加一层或者减少一层。
力控制模式
力闭环是力传感器与命令信号之间进行比较,控制器以0.4ms的循环周期来检测力传感器与命令值之间的差值,伺服根据差值来调整电机的进给,
从而行成一个力闭环。
在力闭环中由于力传感器本身有数值的波动,
该波动在闭环系统中会产生波动差值从而引起整个闭环系统按照波动不停的调整进给,
所以在力闭环的过程中需要加滤波来过滤传感器的本身波动,从而减少波动对系统的影响。
>> 了解更多信息
1、您想了解更多的商家信息吗? 可以点击按钮,了解更多详细。
2、您可以请点击按钮,查看更多电子产品制造设备商家。
3、想查点看更多产品信息,可以查看 电子产品制造设备产品库,了解更多。
4、在线联系
Tel:
¥2700.00元
¥66.00元
¥66.00元