机器人减速机10大特色:
1、机器人减速机传动新颖,优点独具
具有摆轮传动中圆形针齿的固齿轮而无摆轮,具有谐波齿轮传动的优点而无柔轮, 具有少齿差行星传动大传动比而无干涉,具有章动传动承载力大的优点而无章动传动。
2、机器人减速机运行平稳,噪音较低
多齿啮合,重叠系数大,双排结构机理平衡,滚动及侧间除隙,可避免齿轮干涉,使得机械震动及噪音限制在**小程度;
3、机器人减速机传动精确,误差较小
由於多齿嚙合,轮齿误差可相互补偿,因此传动误差值仅為齿轮减速机的 25% 。
4、机器人减速机滑动微小,效率**高
由於嚙合件均係滚柱构成,全系统基本上為滑动中带滚动,机械损失微乎其微,所以可得极高的齿轮传动效率,单段减速机**高可达 95% 左右
5、机器人减速机激波径大,出力较高
由於激波规律的特性,滚柱波动传动的激波径一般均较其他行星传动机构大,因此容许传达转距也较高。
6、机器人减速机传动比大,结构紧凑
传动比為滚柱盘滚柱的个数,所以单段传动即可获得很大的传动比,出入力轴位於同一轴心线上,结构精简紧凑,和同条件的齿轮减速机及蜗轮减速机相比,体积显的轻盈。
7、机器人减速机多齿嚙合,承载力大
双波结构同时嚙合齿数可达 50%,一般齿轮传动仅约 1~2 齿,因此承载力比相同条件的齿轮减速机和蜗轮减速机来的大。
8、机器人减速机齿型,寿命**长
独创活齿机构,工艺良好,加工简易,成本较低,加以所具有的真圆齿型,内聚力强,不易崩齿,不仅保养容易,寿命也较长。
9、机器人减速机耗能较省,经济性佳
由於出力大,效率高,能量损耗小,工作负荷减轻,长期运转,经济效益显著。
10、机器人减速机中空系列,输出简单
部份滚柱个齿,於低速比传动中採用中空形式,可直接输出等速运动,不仅改善了传动性能,也简化了等速输出结构。小于1弧-分的背隙
;强抗扭刚度,体积紧凑
;零部件同轴式实现更多设计灵活性
;更大推力和悬臂式动量的集成式角轴承
;高减速比(**大至250:1)且不增加减速机尺寸
;**大转矩至5X额定转矩(紧急停止)
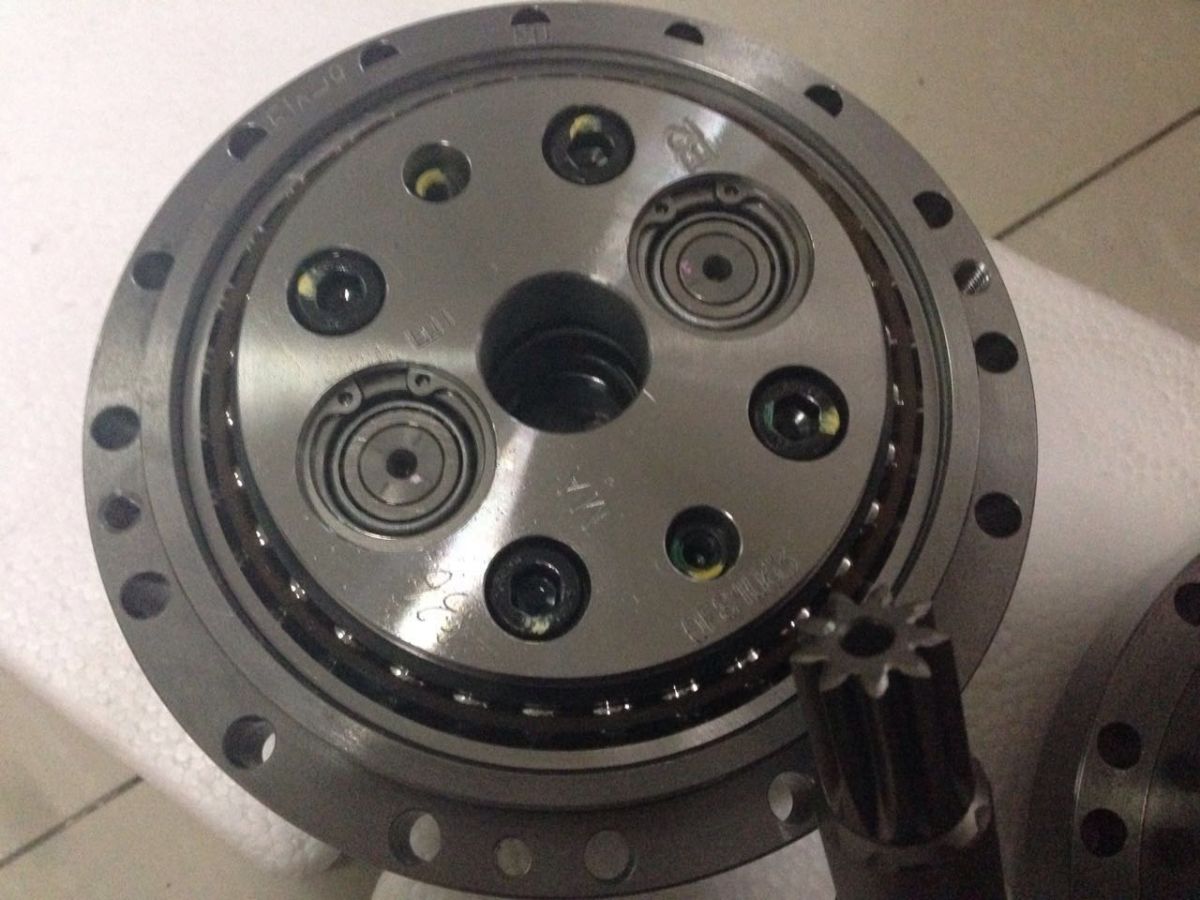
减速器在非常紧凑和高精度零部件配置下性能卓越。部件包含滚动接触部件,以实现较高效率和较长使用寿命,集成式角轴承支持外部负载,而且两级和三级减速设计在提高减速比的同时减少了震动。
更长的使用寿命和可靠性
减速器包含一个专利的两级和三级减速设计,可提供更大扭矩,以及在保证高精密度和轻量的前提下提供高减速比和高耐冲击荷载能力。RV使用滚动接触部件以摆线设计的独特针齿和RV齿轮结构减少磨损、延长使用寿命、降低背隙,使其比传统的减速机具有更强的耐冲击能力,并进一步降低背隙。减速器同样搭载了一套大型内角轴承,以实现更大的负荷能力,以便减少外部支撑设备的需求——从而减少了设计时间和安装成本。
实际对称齿轮设计以及滚珠轴承支撑的所有轴,均保证使用期内的恒定性能,并允许在短时间内峰值达到额定扭矩的5倍(比如,紧急停止时)。

RV减速机
机器人减速机
帝人RV减速机
Tel:
¥24.00元
¥24.00元
¥24.00元
Tel:
¥面议
¥面议
¥面议
Tel:
¥面议
¥面议
¥3400.00元
Tel:
¥10000.00元
¥10000.00元
¥10000.00元