
西安钱江焊接机器人
关节机械手 小型 机械手臂机器人 机械手臂 自动化 小型机械手
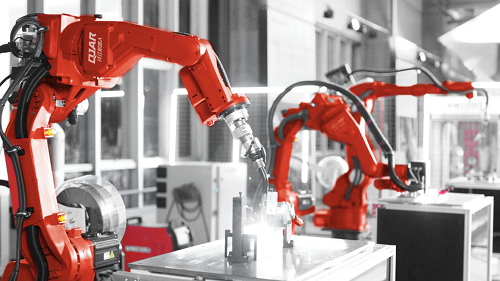
西安钱江焊接机器人总体方案

根据连接板的尺寸、结构特点以及焊缝的形式,考虑到底板和四个销柱是采用单面焊缝形式,焊缝在工件上呈规则性均匀分布,焊接过程不需要变位即可满足所有焊缝的焊接。为降低成本和提高效率,在进行西安钱江焊接机器人整体方案设计时,决定不采用翻转工装等机器人周边设备,而采用固定平台方式实现工件的焊接定位,同时为提高焊接效率西安钱江焊接机器人系统方案采取一机双工位的模式,H型布置方式,西安钱江焊接机器人本体固定在两自制焊接工作定位平台之间,工作时一工位焊接机器人对人一侧工件进行自动焊接,另一工位可以装卸工件,交替进行作业,保证机器人连续不停工作。
西安钱江焊接机器人是焊接自动化的进步,它突破了焊接的传统方式,开拓了柔性自动化焊接新方式。相比人工焊接,机器人自动化焊接有了相当多的优势!稳定和提高焊接质量,保证焊缝均匀性。
Tel:
¥24.00元
¥24.00元
¥24.00元
Tel:
¥面议
¥面议
¥面议
Tel:
¥面议
¥面议
¥3400.00元
Tel:
¥10000.00元
¥10000.00元
¥10000.00元



